OpenShift Advent Calendar 2023/AWS Containers Advent Calendar 2023の12/14の記事です。
Red Hatの小島です。
2023年12月に、Managed OpenShiftサービスの1つであるROSAを無料で試せるROSA Hands-on Experienceというサービスがリリースされました。本記事では、同時期に提供開始しましたROSA Hosted Control Plane (HCP)の特徴と共に、ROSA Hands-on Experienceの概要をご紹介します。
ROSA Hosted Control Plane (HCP)
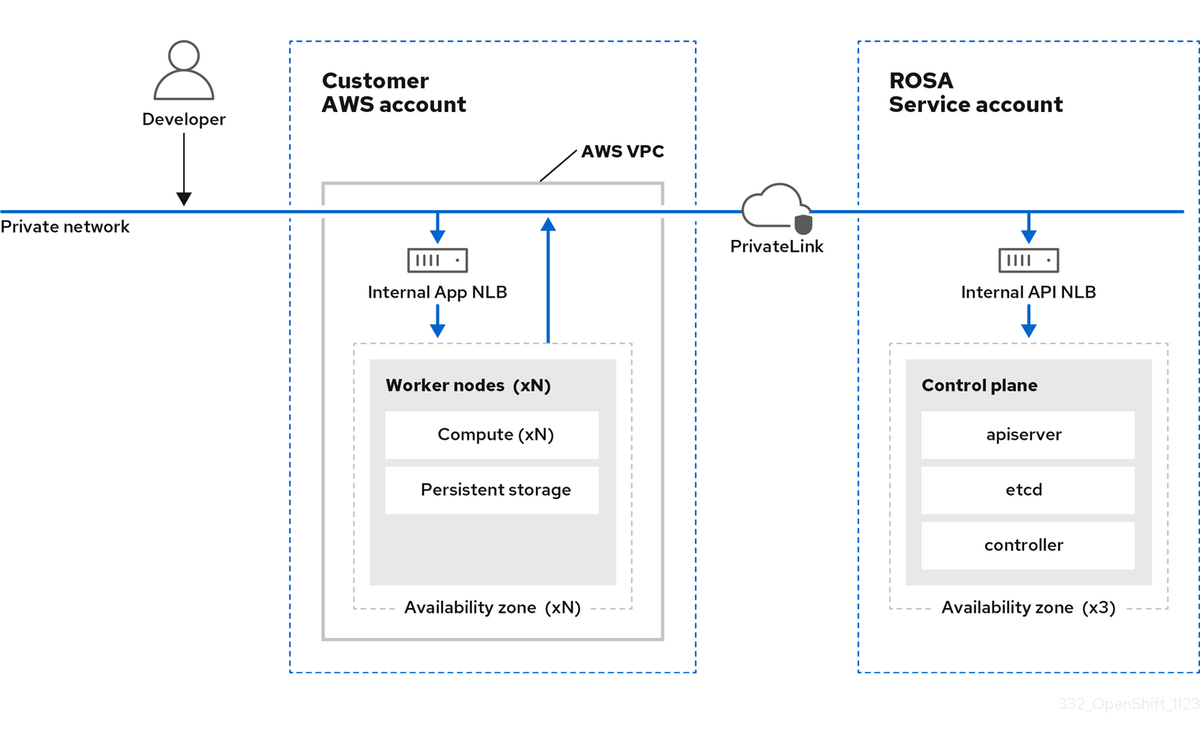
ROSA HCPは、OpenShift 4.14のベアメタルおよびOpenShift Virtualizationで正式にリリースされたHosted Control Planeが取り入れられたROSAです。ROSA HCPでは、OpenShiftのコントロールプレーンがRed Hat SREチームのAWSアカウントに作成されるOpenShiftクラスターのPodとしてデプロイされるようになり、ユーザーのAWSアカウントにはワーカーノードのみデプロイされます。これによって、ユーザーにはコントロールプレーンが隠蔽されてワーカーノードしか見えなくなる、というシンプルな構成になりました。
ROSA HCPは、コントロールプレーン/インフラノード/ワーカーノードが全てユーザーのAWSアカウントに作成される従来のROSA(ROSA Classicと定義しています)に比べると使い勝手がかなり向上しており、次のような特徴を持つため、Kubernetesインフラ観点ではAmazon EKSなどのManaged Kubernetesサービスに近いものとなっています。
- 最小構成がワーカーノード2台構成 (SingleAZ/MultiAZ共通。デフォルトはm5.xlarge(4vCPU/RAM16GiB) x2)
- クラスターデプロイ時間の短縮 (ROSA Classic: 40分~。ROSA HCP: 25分~)
- ワーカーノードをAZ単位で1台から追加可能 (SingleAZ/MultiAZ共通)
- ワーカーノード追加時のバージョン選択が可能
- コントロールプレーンの更新時間の短縮 (ROSA Classic: 90分ほど。ROSA HCP: 15分ほど)
- コントロールプレーンとワーカーノードの更新の分離
- 一部のワーカーノードのみを更新するという部分更新の対応
これらのインフラ的な特徴に加えて、
- コンテナアプリケーションの開発/運用を支援するための様々な機能
- アプリケーションのトポロジー/モニタリング/ロギングを利用するためのWebコンソール
- Visual Studio Code的なWeb IDE (AI搭載生産性向上ツールであるAmazon CodeWhispererプラグインも利用可能)
- 様々なフォーマットの入力に対応した、アプリケーションビルド/デプロイの自動化
- Gitリポジトリのソースコード/Dockerfile, コンテナイメージ, JARファイルなど
- アプリケーションのベースOSとなるRHELのサポート
- Red Hatのパートナーエコシステムによる、様々なミドルウェアのサポート (Kubernetes Operator含む)
- 上記機能をマルチテナント的に利用するための、外部認証プロバイダーとの連携
- エンタープライズシステムとして利用するための、Kubernetes基盤のセキュリティ強化 (コンテナアプリでのroot利用禁止など)
といったOpenShiftならではの特徴も備えているため、エンタープライズ用途にパッケージングされたManaged KubernetesサービスをAWS上で利用したい場合に、ROSA HCPが適したサービスであると言えます。
ROSA HCPの料金情報
ROSA HCPを利用する場合、次の3つの合計金額がAWSからユーザーに請求されます。Red Hatからの請求料金はありません。
- ROSA HCPのクラスター料金 (1クラスター辺りの料金。0.25USD/cluster/時間)
- ワーカーノードのサービス料金 (0.171USD/4vCPU/時間)
- AWSリソースの利用料金 (ワーカーノードのEC2インスタンス, EBS, S3, NAT Gatewayなど)
デフォルトはm5.xlarge(4vCPU/RAM16GiB)インスタンスの2台構成となりますので、AWS料金情報に基づいて、オハイオリージョンでのSingleAZ2台構成の1時間辺りの利用料金を計算してみると、大体の目安は$1.3/時間~となります。主なAWSサービスの料金内訳は次のようになります。計算の簡単化のために、料金内訳からはS3やデータ転送などの利用料金を除いています。
- クラスター料金
- $0.25 (0.25(USD/cluster) x 1(cluster))
- ワーカーノードのサービス料金
- $0.342 (0.171(USD/4vCPU) x 2(4vCPU))
- ワーカーノードのEC2/EBS(300GiB x2)の利用料金
- $0.467 (0.192(USD) x 2 + 0.1(USD/GB/month) x 300(GB) / 720(時間/month) x 2)
- NAT Gatewayの利用料金 (プライベートサブネット1つに付き1つ作成されます)
- $0.045
- NLBの利用料金
- $0.0225
コントロールプレーンとインフラノードも料金請求の対象であった従来のROSA Classicと比較すると、かなりスリム化した料金となっています。なお、ROSA HCPでは、インフラノードとしてみなされるワーカーノードはありません。ルーター/レジストリ/モニタリングなどのコンポーネントは全てワーカーノード上で稼働し、全てのワーカーノードの利用料金が請求されることになります。
ROSA Hands-on Experience
本題です。ROSA Hands-on Experienceは、Red Hatのデモプラットフォームを利用して、ユーザーが無料でROSA HCPクラスターにアクセスして、ハンズオンができるサービスです。Red Hatアカウントでログインして「Request experience」をクリックすると、大体数十秒でデモプラットフォーム上のROSA HCPクラスターにアクセスできるようになっています。このサービスを利用する場合、AWSアカウントをご用意いただく必要はありません。
また、この画面からROSAコミュニテイのSlackチャネル(英語)に参加できるだけでなく、ハンズオン中に質問がある場合、画面右下のRed Hatロゴをクリックすることで、Red Hatのカスタマーサクセスチームと英語チャットができるようになっています。

デモプラットフォームにアクセスすると、次のような画面が表示されます。ユーザーは画面左半分のコンテンツに表示されるコマンドを、画面右半分のTerminalにコピペして、ROSA HCPクラスターを操作していく流れとなります。また、ROSA HCPクラスターの管理者アカウントで、Webコンソールにログインして利用できるようにもなっています。これらのコンテンツは全て英語となっているため、必要に応じてWebブラウザの機械翻訳機能を使ってください。

2023年12月時点での、ROSA Hands-on Experienceのコンテンツは下記の16項目です。ROSA特有の項目だけ学習したい場合は、1. Explore the ROSA environmentから6. Configure Red Hat SSO IDP for ROSAまでだけを実行してもいいでしょう。
・ROSA特有の内容を含むコンテンツ
- Explore the ROSA environment
- Upgrade your ROSA cluster
- Managing Worker Nodes
- Autoscale your ROSA Cluster
- Labeling your Worker Nodes
- Configure Red Hat SSO IDP for ROSA
・ROSAだけでなく、Self-Managed OpenShiftでも実行可能なコンテンツ
- Configure Red Hat OpenShift Logging with AWS Cloudwatch
- Deploy an Application with AWS Database
- Deploy an Application with Red Hat OpenShift GitOps
- Secure your applications with Network Policies
- Make your application resilient
- Service Mesh Introduction
- Install Service Mesh Operator
- Deploy Service Mesh Control Plane
- Deploy a Service Mesh example application
- Configure and observe Service Mesh traffic
なお、ROSA Hands-on Experienceについては、8時間/1回の利用を3回まで(延べ24時間)という制限があります。4回目以降の利用はできませんので、ご注意ください。
ROSA HCPワークショップ日本語コンテンツ
上記を翻訳したコンテンツではありませんが、主にROSA HCP特有の項目にフォーカスして、ROSA HCPクラスターでのアプリケーション開発/運用の基礎を体感していただくための日本語コンテンツ(下図の「ROSA Lab」と記載しているもの)も別途提供しています。この日本語コンテンツを参考にしながら、ROSA Hands-on Experienceで払い出されたROSA HCPクラスターでハンズオンを実施することもできます。ただし、その場合は次の制限がありますのでご注意ください。
- この日本語コンテンツは、Red Hatのカスタマーサクセスチームの管理下にないため、チャットやSlackでの質問はできません。
- ROSA HCPクラスターの作成手順は実行できません。
- ROSA Hands-on ExperienceではAWS IAMユーザーを払い出さないため、この日本語コンテンツで紹介しているCloudWatchでのロギング設定/確認手順は実行できません。
- ワーカーノードについては、既存のMachinepool(ROSAでワーカーノードを扱う単位)についてのみ編集(ワーカーノードの追加/削除/オートスケール化/更新など)できます。そのため、新規Machinepoolの追加や削除は実行できません。
- 最新版のROSA HCPクラスターが払い出されている場合、ROSA HCPクラスターの更新手順は実行できません。
ROSA HCPワークショップ日本語コンテンツは、下記のリンクからご参照ください。

このワークショップ日本語コンテンツについては、ご要望次第で個社向けにも開催しています。ご興味がありましたら、Red Hatの担当営業や下記の「購買専用のお問い合わせ」フォーム(「追加情報」記入欄に「赤帽ブログで見た個社向けROSA HCPワークショップについての詳細を希望」などをご記入ください)からお問い合わせください。